Doppler Velocity Log (DVL)
Designed and developed to make high specification DVL performance available at an affordable price, while ensuring it’s simple for anyone to use. Enabled by proprietary transducer design, developing advanced algorithms and removing every millimetre of space that’s not absolutely needed.


The smallest DVL in the world
From 0.105kg and 25mm x 66mm.

World's shortest blanking distance
Operate virtually at the seabed, as low as at 5cm altitude.

Unbeatable price/ performance
From less than US$ 8,000.
Doppler velocity log - operating concept
The DVL estimates velocity relative to the sea bottom by sending acoustic waves from the four angled transducers and then measures the frequency shift (doppler effect) from the received echo.
By combining the measurements of all four transducers and the time between each acoustic pulse, it is possible to very accurately estimate the speed and direction of movement.
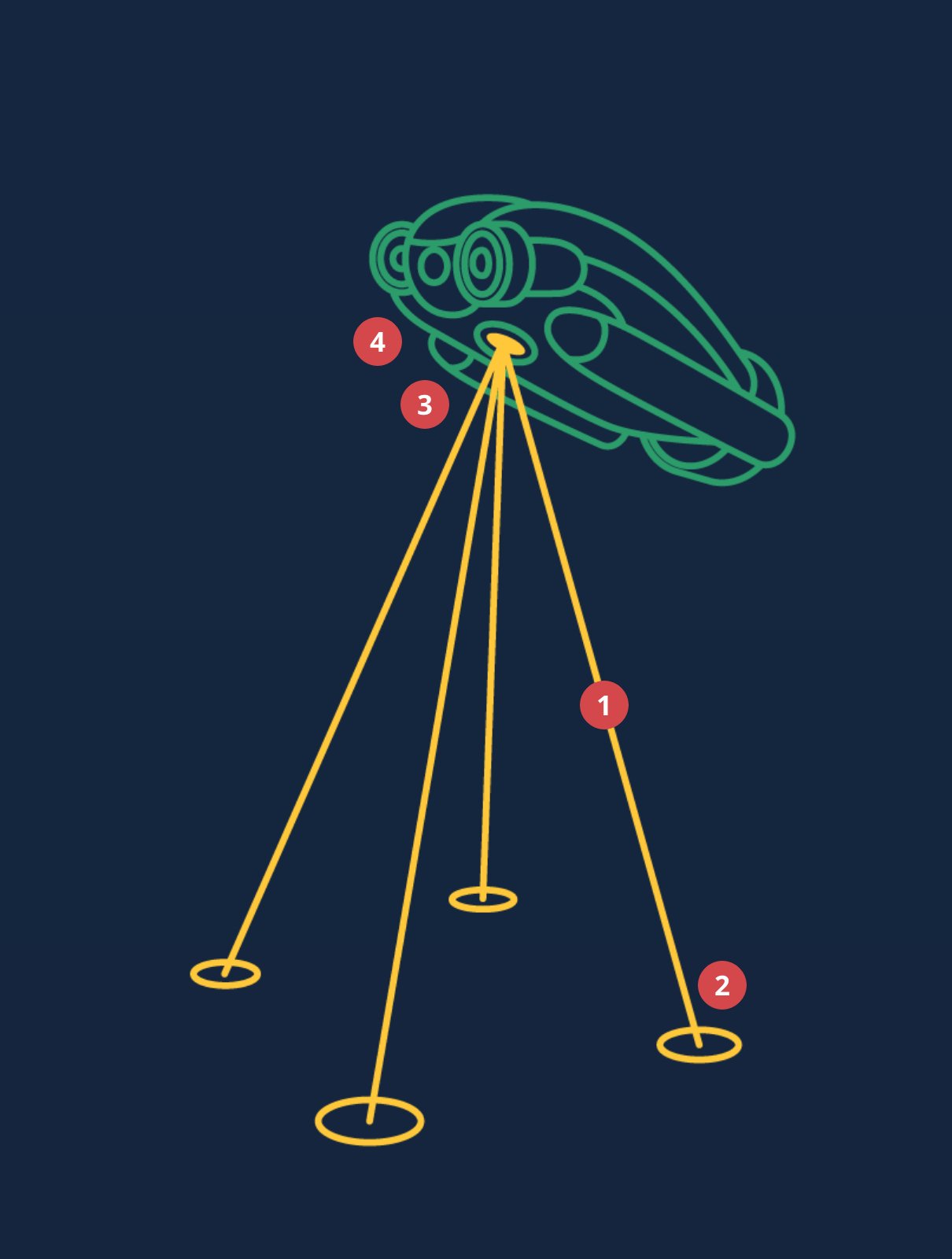
1. Sound wave sent Acoustic narrow beam wave is sent from each of the four transducers.
2. Sound wave echo The sound wave will bounce off the bottom and the transducers will receive the echo.
3. Measurements performed The DVL computer measures the received echo and the IMU:
- Doppler measurement. The difference in frequency between transmitted and received signal is the “Doppler effect” which is used to calculate the velocity.
- Time of flight. This gives a measurement of the distance between the transducer and the seabed (altitude).
- AHRS/IMU. The onboard Attitude and Heading Reference System (AHRS) / Inertial Measurement Unit (IMU) reads its triaxial gyroscope, accelerometer, and compass sensors to determine orientation.
4. Velocity calculated Estimated distance travelled, time of flight and AHRS headings are all fed into our Kalman filter which in turn will output the velocity of the DVL.
Use cases of Water Linked DVLs
An onboard computer removes the need for external computers or topside communication, enabling the Water Linked DVL to be used as a navigation sensor on a range of underwater platforms.

ROV
By utilizing a Water Linked DVL, the ROV operator will experience a whole new level of stability and control when operating the ROV. Thanks to the increased stability, the quality of the video will improve dramatically as the ROV pilot carries out his works with increased confidence.
Examples:
- Maintaining stability while operating ROV tools or performing detail inspections.
- Station keeping in challenging situations like ocean currents or tether pull.
- Terrain following.
- General velocity feedback for vehicle control.
AUV
Autonomous Underwater Vehicles (AUV) are usually operating without tethers or with any direct input from the surface. While undertaking long range assignments the AUV is typically also unable to relay on an acoustic positioning system for navigation information.
Therefore the most used navigation sensor for an AUV is a DVL in combination with an inertial sensor (IMU/INS).
Examples:
- Long range assignments.
- Bathymetry surveys.
- Military subsea patrolling.
Diving
Military, police and commercial divers are examples of divers that often have to follow a very accurate dive path.
This can be achieved with reliable acoustic positioning such as our Underwater GPS, however when very long range is needed, you have to look for a solution that does not require topside support. This is where the DVL comes in.
Examples:
- Low visibility diving.
- Long range dives.
- Diver waypoint navigation.
Why size matters
A lot of effort was put into making sure the Water Linked DVL would be truly unique and provide benefits never seen before in a DVL.
We have used modern computing power, designed our own transducers and removed every millimetre of space that was not absolutely needed. The result has been a DVL design that has disrupted the market by using the latest technology.
Competitor comparisons

| Manufacturer | Water Linked | Teledyne | Nortek | ||||
|---|---|---|---|---|---|---|---|
| Model | A50 | A125 | Wayfinder | Pathfinder | DVL1000 G3 | DVL500 | Nucleus 1000 |
| Depth rating (meters) | 600 | 3000 | 300 | 500 | 300 | 300 | 300 |
| Minimum altitude (meters) | 0.05 | 0.05 | 0.5 | 0.15 | 0.1 | 0.1 | 0.1 |
| Maximum altitude (meters) | 50 | 125 | 60 | 89 | 75 | 200 | 50 |
| Diameter (mm) | 66 | 125 | 115 | 229x102 | 114 | 186 | 90 |
| Height (mm) | 25 | 30 | 70 | 71 | 158 | 203 | 42 |
| Weight in air (kg) | 0.17 | 0.98 | 0.85 | 1.9 | 1.7 | 3.5 | 0.54 |
| Weight in water (kg) | 0.1 | 0.5 | 0.51 | ? | 0.3 | 0.5 | 0.3 |
“Teledyne” and “Nortek” are registered trademarks and the property of their respective owners. All company, product and service names used in this article are for identification purposes only. Use of these names, trademarks and brands does not imply endorsement.
Navigation with DVL Only?
A Water Linked DVL has the ability to operate as a stand-alone navigation system providing Dead Reckoning Navigation of your underwater, or on water, vehicle. This is the process of calculating the vehicle's position by applying speed, time and direction of travel compared to the last known position.
Underwater GPS integration (not currently available)
To remove the issue of long-term errors (position drift), it was intended to integrate the DVL with our Underwater GPS G2 system. With the pending launch of our new UGPS, it is now intended to offer this integration as an advanced feature with this new UGPS. The intention is that there will be auto-discovery between the two systems and by integrating the two systems you will be left with an amazing long-term deployment navigation solution.
DVL vs Underwater GPS
These two systems are both used for underwater navigation. They both however have different strengths and weaknesses although if you combine them on one vehicle, you can more or less eliminate the weaknesses of the stand-alone systems.

DVL A125
World’s smallest long range DVL with 0.05–125m altitude.

DVL A50
World’s smallest DVL with 0.05–50m altitude.