Real time underwater noise monitoring system
A solution for offshore wind farm piling noise measurement
Ocean RT Introduction
After several years of practical verification, MIST has been proud of the performance and results of the Ocean RT system software, which successfully assisted Ocean Sonics’ Taiwanese users in underwater noise monitoring during the construction of an offshore wind farm off the west coast of Taiwan
Features
The Ocean RT system is an advanced, real-time underwater noise monitoring and event detection solution developed by MIST in 2020. Built on trusted Ocean Sonics smart hydrophone technology from Canada, Ocean RT was engineered to meet the stringent requirements of Taiwan’s NIEA P210 standard—the world’s first legislated national standard for underwater noise measurement. This groundbreaking regulation requires underwater acoustic monitoring to be conducted in accordance with Germany’s StUK4 guidelines or the ISO 18406 international standard.
Since its launch, Ocean RT has been successfully deployed in multiple offshore wind farm construction projects off Taiwan’s west coast, delivering reliable, real-time monitoring that helps ensure regulatory compliance and environmental protection.
We’ve successfully integrated the Ocean RT system into several offshore wind farm projects, ensuring compliance with NIEA P210 and international standards. It’s a prime example of how MIST combines proven Canadian technology with tailored solutions for the Taiwan market.
Ocean RT Interface Overview
- ISO, Underwater acoustics - Measurement of radiated underwater sound from percussive pile driving. ISO 18406, 2017.
- Investigation of the Impacts of Offshore Wind Turbines on the Marine Environment(StUK4),2013.
- BSH, Offshore wind farms: Measuring instruction for underwater sound monitoring, 2011.
- Taiwan NIEA P210. 21B Underwater Noise Measurement Method.
- Octave-band and fractional-octave-band filters according to IEC 61260-1, 2014.
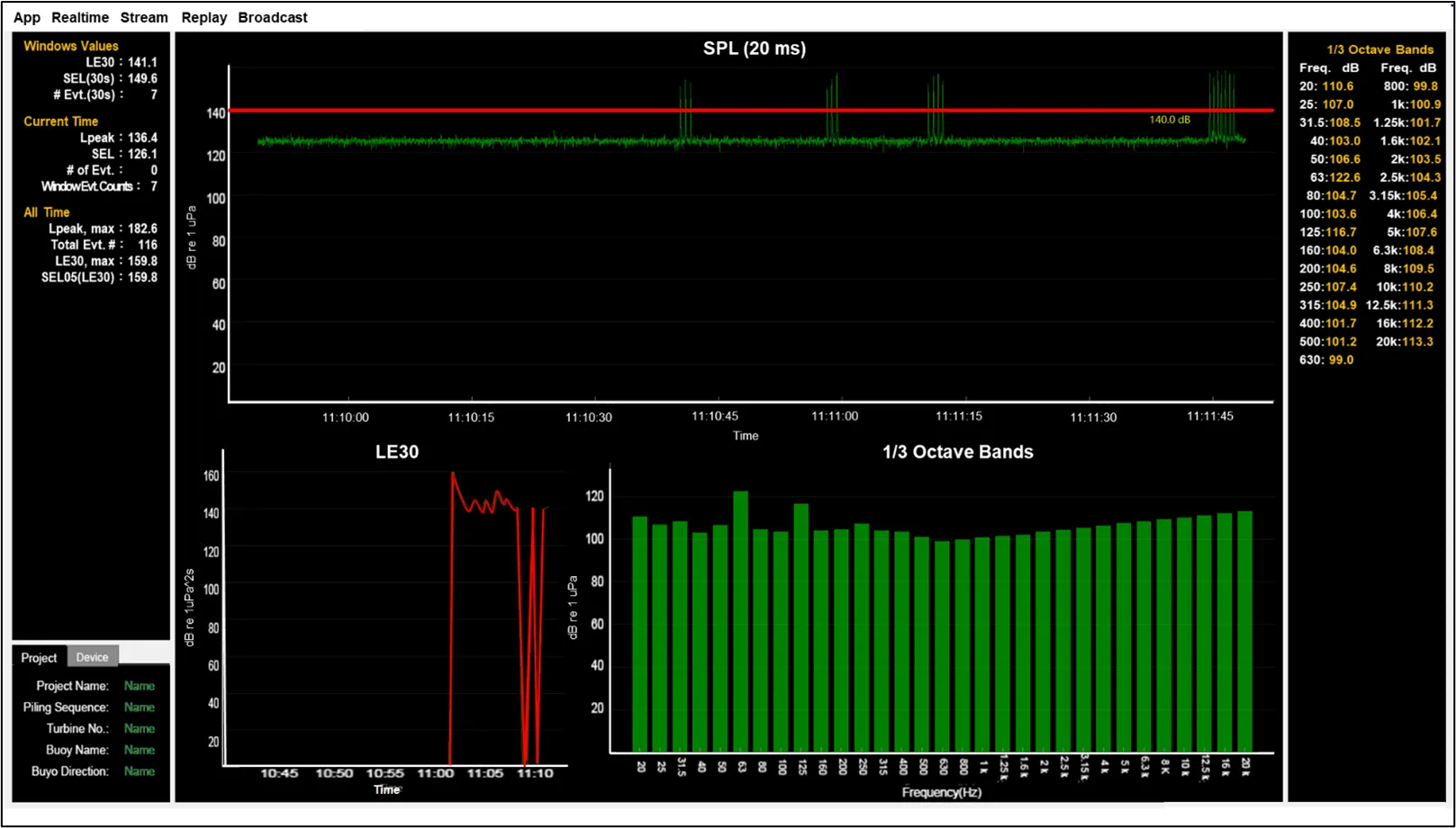
- Update every 30s:LE30、SEL(30s)、# of Evt.(30s)
- Update every 1s:Lpeak、SEL(30s)、# of Evt.(30s)
- Lpeak, max、Max. SEL(30s)、 total # of Evt.(30s)
- General underwater noise events
- Underwater pile driving noise events
- Frequency band-triggering events
Real-time underwater noise monitoring
Underwater acoustic measurement indicators and parameters are based on the following standards:
User-defined underwater noise frequency
Real time display:
Underwater noise data post-processing, including event re-analysis and historical data playback
Band pass filter
Real-time Underwater noise event detection methods include:
Noise event data includes: event start time and end time, event Leq, event SEL, event Lmax, time of event Lmax, event duration、event 1/3 Oct. band data
Offshore wind power development piling construction noise:LE30、SEL(30s)、# of evt. Within 30s
Underwater sound propagation
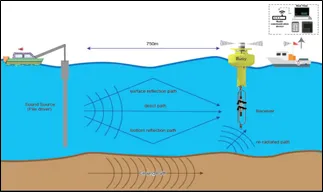
It is generally divided into two categories: deep water and shallow water (Richardson et al. 1995). For most projects involving piling, shallow water conditions are more suitable. There is a direct transmission from the source to the receiver, and there are reflection paths from the surface and bottom. As mentioned above, during the pile driving process, sound energy may also be re-radiated from the seabed and reach the receiver. Typically, ground radiated noise is mainly low frequency and cannot propagate effectively in shallow water.
Event Detection Parameters
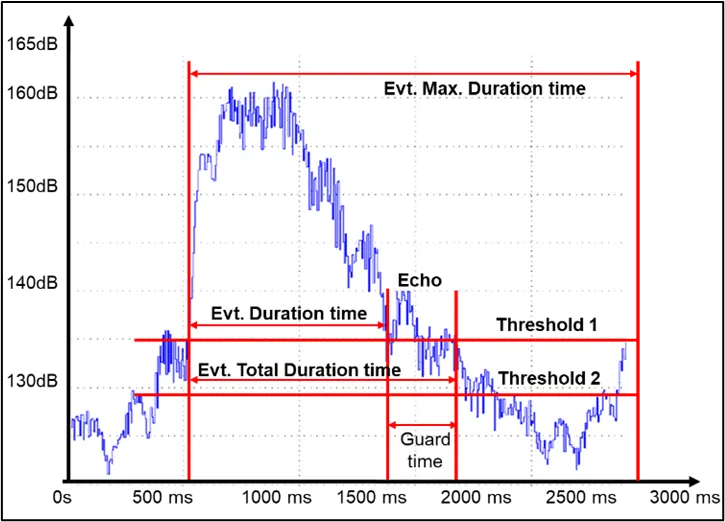
Algorithm 1
- T1 (Primary Threshold) is a user defined noise trigger level. Once the noise level is greater than T1, it may be regarded as a noise event. It also needs to meet the min. duration.
- Evt. Min. Duration is the user-defined duration of noise exceeding T1. When the noise is greater than T1 and its duration is greater than Evt. Duration time, a noise event is established and is recorded separately.
- In the case of continuous high noise that meets the above conditions, once it falls below T1, the entire noise event is considered to be over.
- Users can also define the maximum Evt. Duration. Once the duration of high noise exceeds the max. Evt. Duration, the system will ignore this noise event.
Algorithm 2
- T2 secondary threshold, ≤ T1
- guard time, ≤ Evt. Min. Duration
In addition to the parameters for algorithm 1, the following new parameters are added:
System composition
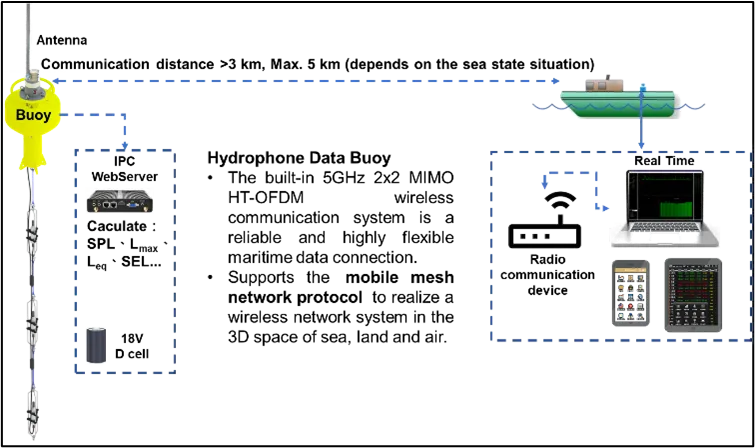

System
For remote offshore monitoring, Ocean RT can be integrated into a buoy-based system comprising:
• Industrial Computer: Facilitates real-time storage and processing of underwater acoustic data or hosts the optional Ocean RT software.
• Battery Box: Supports up to 72 D-cell batteries for extended operation in offshore environments.
• Radio Communication System: Wireless communication ranges from 3 km to 10 km, depending on configuration.
• Outdoor Antenna: Ensures stable long-range data transmission.
• Power Supply: Provides DC 18V power for the entire system.
• System Connectivity and Interfaces
Ocean RT is typically installed on an industrial computer equipped with multiple data interfaces; it includes 1TB SSD for secure data storage.
Customizable user interface (UI) design available upon request for ease of operation and data visualization.
RJ45 (Ethernet)、RS232 / RS485 (Serial Communication)