多普勒速度測速儀(DVL)
這款產品經過精心設計和開發,旨在以實惠的價格提供高規格的數位視訊定位 ( DVL ) 性能,同時確保任何人都能輕鬆使用。其成功得益於專有的感測器設計、先進的演算法開發以及對不必要的空間進行精簡。


世界上最小的 DVL
重量從 0.105 公斤起,尺寸為 25 毫米 x 66 毫米。

世界上最短的消隱距離
幾乎可以在海底操作,最低可達 5 公分高度。

無與倫比的性價比
不到 8000 美元。
多普勒測速儀-運作原理
多普勒測速儀( DVL )透過四個傾斜的換能器發射聲波,然後測量接收到的回波的頻率偏移( 多普勒效應 ),從而估算物體相對於海底的速度。結合所有四個換能器的測量結果以及每個聲音脈衝之間的時間間隔,可以非常精確地估算物體的運動速度和方向。
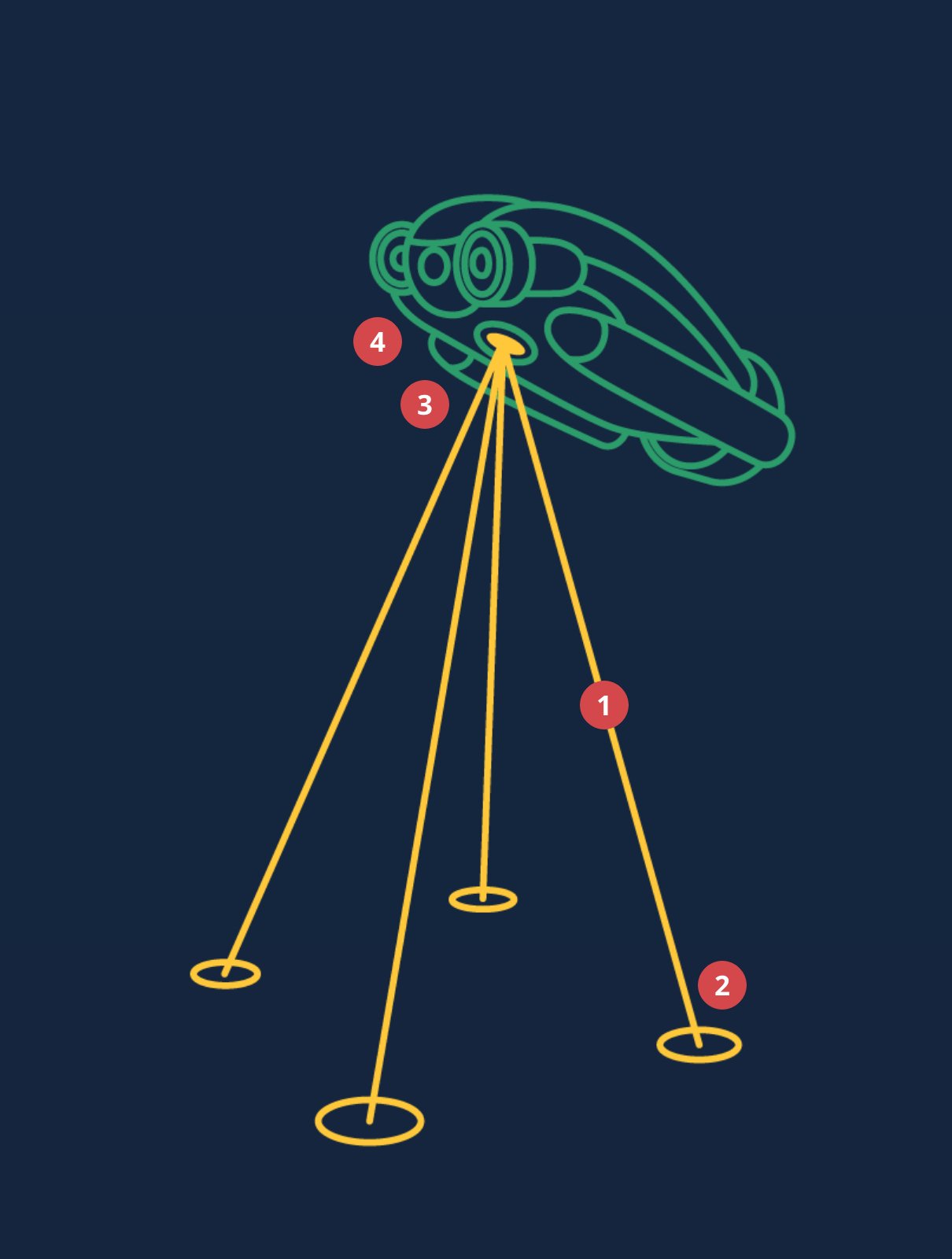
1.發射聲波:四個換能器分別發射窄波束聲波。
2.聲波回波:聲波從水底反射,換能器接收回波。
3.測量: DVL 電腦測量接收到的回波,IMU 測量:
- 多普勒測量。發射訊號和接收訊號之間的頻率差稱為“多普勒效應”,用於計算速度。
- 飛行時間。這可以測量換能器與海底之間的距離(高度)。
- AHRS/IMU。船上姿態航向參考系統 ( AHRS ) / 慣性測量單元 ( IMU ) 讀取其三軸陀螺儀、加速度計和羅盤感測器的資料以確定方向。
4.速度計算:估計的行駛距離、飛行時間和 AHRS 航向都輸入到卡爾曼濾波器中,該濾波器最終輸出 DVL 的速度。
水連結式 DVL 的應用案例
內建電腦無需外部電腦或水面通信,使 Water Linked DVL 能夠用作各種水下平台的導航感測器。

透過使用水連接式數位視訊線
(Water Linked DVL),ROV 操作員在操作 ROV 時將體驗到前所未有的穩定性和操控性。由於穩定性的提升,視訊品質將顯著提高,ROV 操作員也能更有自信地開展工作。
例如:
- 在操作 ROV 工具或進行精細檢查時保持穩定性。
- 在諸如洋流或繫繩拉力等複雜環境下保持位置穩定。
- 地形跟隨。
- 提供用於車輛控制的通用速度回饋。
自主水下航行器 ( AUV )
通常無需繫繩或任何來自水面的直接輸入即可運作。在執行遠距離任務時,AUV 通常也無法依賴聲學定位系統來取得導航資訊。
因此,AUV 最常用的導航感測器是多普勒測速儀( DVL )與慣性測量單元( IMU/INS )的組合。
應用範例:
- 遠距離任務;
- 水深測量;
- 軍事水下巡邏。
軍用
警用和商業潛水員經常需要沿著非常精確的潛水路線行進。
可靠的聲學定位技術,例如我們的水下 GPS,可以實現這一點。然而,當需要超遠距離定位時,就必須尋找一種無需水面支持的解決方案。這時,DVL( 潛水員航點定位系統 )就派上了用場。
應用範例:
- 低能見度潛水。
- 遠距離潛水。
- 潛水員航點導航。
為什麼尺寸很重要
我們投入了大量精力,確保這款水聯式數位速度計( Water Linked DVL )真正獨一無二,並能提供前所未有的優勢。
我們運用了先進的運算能力,自主設計了感測器,並精簡了每一毫米不必要的空間。最終,我們打造了一款採用最新技術的顛覆性數位速度計。
競爭對手比較

| 製造商 | Water Linked | Teledyne | Nortek | ||||
|---|---|---|---|---|---|---|---|
| 模型 | A50 | A125 | Wayfinder | Pathfinder | DVL1000 G3 | DVL500 | Nucleus 1000 |
| 深度等級(米) | 600 | 3000 | 300 | 500 | 300 | 300 | 300 |
| 最低海拔( 公尺 ) | 0.05 | 0.05 | 0.5 | 0.15 | 0.1 | 0.1 | 0.1 |
| 最高海拔( 公尺 ) | 50 | 125 | 60 | 89 | 75 | 200 | 50 |
| 直徑( 毫米 ) | 66 | 125 | 115 | 229x102 | 114 | 186 | 90 |
| 高度( 毫米 ) | 25 | 30 | 70 | 71 | 158 | 203 | 42 |
| 空氣中的重量( 公斤 ) | 0.17 | 0.98 | 0.85 | 1.9 | 1.7 | 3.5 | 0.54 |
| 水中的重量( 公斤 ) | 0.1 | 0.5 | 0.51 | ? | 0.3 | 0.5 | 0.3 |
「Teledyne」和「Nortek」是註冊商標,歸其各自所有者所有。本文中使用的所有公司、產品和服務名稱僅用於識別目的。使用這些名稱、商標和品牌並不意味著認可。
僅支援 DVL 導航?
水聯式數位速度計 ( DVL ) 可作為獨立導航系統運行,為水下或水面航行器提供航位推算導航。航位推算透過結合速度、時間和航行方向,並與上次已知位置進行比較,來計算航行器的位置。 航位推算的挑戰在於,微小的速度誤差會累積,隨著時間的推移,會導致位置估計精度降低。為了緩解這一問題,DVL 可以與其他導航感測器結合使用,從而降低這種影響。
水下 GPS 整合( 目前不可用 )
為了消除長期誤差( 位置漂移 )問題,我們原本計劃將DVL與我們的水下 GPS G2 系統整合。隨著新款UGPS即將發布,我們現在計劃將此整合作為一項高級功能提供給新款 UGPS。我們的目標是實現兩個系統之間的自動發現,透過整合這兩個系統,您將獲得一套卓越的長期部署導航解決方案。
DVL 與水下 GPS
這兩種系統都用於水下導航。然而,它們各自有不同的優勢和劣勢,但如果將它們結合在一艘載具上,就可以或多或少地消除單一系統的缺點。

DVL A125
世界上最小的遠程 DVL,探測高度為 0.05-125 公尺。

DVL A50
世界上最小的 DVL,高度 0.05-50 公尺。